Vi skal her i denne sektion anvende de resultater fra de forrige sektioner i kapitlet “vektorer i planen” til at analysere rette linjer. Vi har allerede arbejdet med rette linjer under kapitlet “sammenhænge“. Vi så i kapitlet at en ret linje kan beskrives på formen \(y=ax+b\). Vi skal her fordybe os lidt mere og beskæftige os med rette linjer i en mere matematisk form. Det vil med andre ord sige, at vi vil behandle den rette funktion fra en geometrisk perspektiv.
Den rette linje
Vi vil her beskrive den rette linje på vektorform. Lad os forestille os at vi har en ret linje der løber i et koordinatsystem. Vi kalder denne rette linje for \(I\), der går gennem et kendt punkt. Herudover forestiller vi os en vektor, der står vinkelret på vores linje (denne vektor kaldes for normalvektoren til den rette linje).
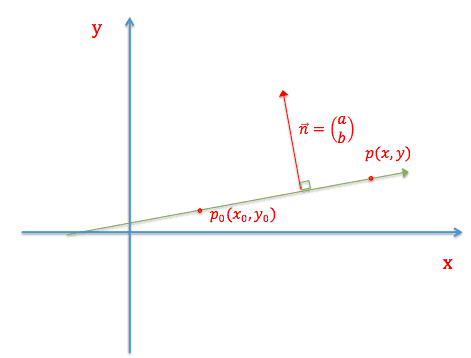
Vi har i tegningen udover de nævnte elementær også markeret punktet \(P\). Punktet \(P\), er et såkaldt løbende punkt \(P(x,y)\). Det betyder såmænd, at punktet ligger et sted på linjen, men ikke et fast sted. Vi har ikke stillet specielle krav til dets beliggenhed. Punktet \(P\), er altså et vilkårligt punkt på linjen. Lad os nu danne en vektor der løber fra det kendte punkt til det løbende punkt, på linjen.
Vektoren der forbinder disse to punkter har følgende koordinat:
\(\vec{P_0P}=\begin{pmatrix} x-x_0 \\ y-y_0 \end{pmatrix}\)
Vektoren \(\vec{P_0 P}\) vil for \(P\neq P_0\) være parallel med linjen.
Da vektoren er parallel med linjen, må der i forhold til normalvektoren gælde:
\(\vec{n}\cdot\vec{P_0P}=0\)
\(\begin{pmatrix} a \\ b \end{pmatrix} \cdot \begin{pmatrix} x-x_0 \\ y-y_0 \end{pmatrix}=0\)
\(a(x-x_0)+b(y-y_0)=0\)
Hermed er det nu vist, at netop de punkter \(P(x,y)\), der ligger på linjen, har præcis de koordinater, der passer i \(a(x-x_0)+b(y-y_0)=0\), som man kalder for linjens ligning.
Ligningen for en ret linje som defineret på den “gamle” måde har en begrænsning. Linjens ligning på formen \(y=ax+b\), kan ikke beskrive lodrette linjer. Det kan derimod den “nye” form. Lad os antage, at vi har en lodret linje, der går gennem \((4,7)\) i følgende eksempel.
Vi antager, at den lodrette linje går gennem \((4,7)\) med \(\vec{n}=\begin{pmatrix} 3 \\ 0 \end{pmatrix}\). Vi kan nu anvende linjens ligning til at beskrive den lodrette linje. Dvs.
\(3(x-4)+0(y-7)=0\)
\(x=4\)
Hvis \(b\neq0\) kan vi isolere \(y\) i linjens ligning. Dette giver:
\(a(x-x_0)+b(y-y_0)=0\)
\(by=-ax+ax_0+by_0\)
\(y=-\frac{a}{b}x+\frac{ax_0+by_0}{b}\)
Vi har hermed skrevet den rette linjes ligning på den “gamle” form.
Parameterfremstillingen for en ret linje
Der findes flere måder at beskrive en ret linje i et koordinatsystem, end den gamle form fra C-niveau samt den nye metode, vi lige har set. I c-niveau skrev vi linjens ligning på formen \(y=ax+b\) og her brugte vi en normalvektor sammen med et kendt punkt. Nu vil vi prøve at beskrive en ret linje i et koordinatsystem ved hjælp af en såkaldt retningsvektor og et kendt punkt.
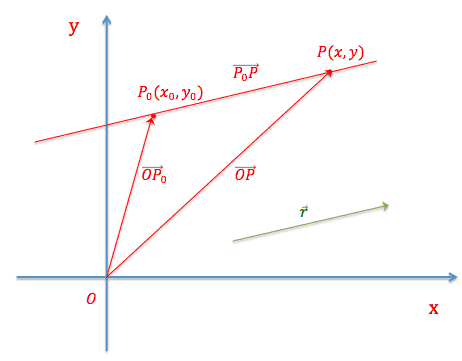
Vi ser her den grønne retningsvektor, der er parallel med den røde linje, der både går gennem det kendte punkt samt det løbende punkt. Der gælder nu:
Da \(\vec{P_0P}\) samt \(\vec{r}\) også er parallelle, kan vi skrive \(\vec{P_0P}\) som et tal \(t\) ganget med \(\vec{r}\). Dvs.
\(\vec{P_0P}=t\vec{r}\)
Tager vi nu udgangspunkt i stedvektoren til punktet \(P\), kan vi ved hjælp af indskudsreglen udtrykke det ved:
\(\vec{OP}=\vec{OP}_0+\vec{P_0P}=\vec{OP}_0+t\vec{r}\)
Dette kalder man for parameterfremstilling for en linje. Vi kan også skrive det ud i koordinater:
\(\begin{pmatrix} x \\ y \end{pmatrix}=\begin{pmatrix} x_0 \\ y_0 \end{pmatrix}+t\cdot\begin{pmatrix} r_1 \\ r_2 \end{pmatrix}\)
\(t\) kaldes for en parameter, derfor bliver denne beskrivelse kaldt for parameterfremstilingen for en linje. Hvis vi lader parameteren \(t\), løbe gennem alle reelle tal, svarer det til at punktet \(P\), gennemløber linjen. Læg mærke til at parameterfremstillingen skrevet ud i koordinater også bliver kaldt for vektorligningen. Der er tale om 2 ligninger, dvs. en for hver koordinat. Når vi senere skal arbejde med vektorer i rummet, vil der være 3 ligninger og ikke 2 som her.
Ortogonale linjer
To linjer er ortogonale, hvis de står vinkelret på hinanden. Der er visse måder man kan afgøre om to linjer er ortogonale eller ej. For at undersøge, om to linjer er ortogonale kan man enten beregne prikproduktet af linjernes normalvektorer eller linjernes retningsvektorer. I kraft af, at resultatet giver 0, er linjerne ortogonale. Vi skal her se et eksempel.
Eksempel
Vi antager, at vi har fået givet to linjer:
- \(\quad 2x+3y-2=0\)
- \(\quad 3x-2y-2=0\)
Disse to linjer er ortogonale idet:
\(\vec{n}_1\cdot\vec{n}_2=\begin{pmatrix} 2 \\ 3 \end{pmatrix}\cdot\begin{pmatrix} 3 \\ -2 \end{pmatrix}=0\)
Linjerne \(\begin{pmatrix} x \\ y \end{pmatrix}=\begin{pmatrix} 1 \\ 3 \end{pmatrix}+t\cdot\begin{pmatrix} 3 \\ -2 \end{pmatrix}\) og \(\begin{pmatrix} x \\ y \end{pmatrix}=\begin{pmatrix} 1 \\ 3 \end{pmatrix}+t\cdot\begin{pmatrix} 4 \\ 6 \end{pmatrix}\).
\(\vec{r}_1\cdot\vec{r}_2=\begin{pmatrix} 3 \\ -2 \end{pmatrix}\cdot\begin{pmatrix} 4 \\ 6 \end{pmatrix}=0\)
Vinkel mellem to linjer
I visse tilfælde skal man bestemme vinklen mellem 2 linjer, det er heldigvis nemt at beregne vinklen mellem 2 linjer, når deres parameterfremstilling er kendt. Man kan nemlig af parameterfremstillingen aflæse retningsvektorerne og derefter bestemme vinklen mellem disse ved følgende formel:
\(\cos{(v)}=\frac{\vec{r}_1\cdot\vec{r}_2}{|\vec{r}_1|\cdot|\vec{r}_2|}\)
Lad os se på et konkret eksempel: Vi har her fået givet to linjer:
\(\begin{pmatrix} x \\ y \end{pmatrix}=\begin{pmatrix} 1 \\ 3 \end{pmatrix}+t\cdot\begin{pmatrix} 3 \\ -2 \end{pmatrix}\) og \(\begin{pmatrix} x \\ y \end{pmatrix}=\begin{pmatrix} 1 \\ 3 \end{pmatrix}+s\cdot\begin{pmatrix} 4 \\ 6 \end{pmatrix}\)
Disse to linjer, har følgende retningsvektorer:
\(\vec{r}_1=\begin{pmatrix} 3 \\ -2 \end{pmatrix}\) og \(\vec{r}_2=\begin{pmatrix} 4 \\ 6 \end{pmatrix}\)
Indsætter vi nu disse ind i formlen fås:
\(\cos{(v)}=\frac{\begin{pmatrix} 3 \\ -2 \end{pmatrix}\cdot\begin{pmatrix} 4 \\ 6 \end{pmatrix}}{\sqrt{3^2+(-2)^2}\cdot\sqrt{4^2+6^2}}=\frac{12-12}{\sqrt{13}\cdot\sqrt{52}}=0\)
\(v=\cos^{-1}(0)=90º\)
Afstand mellem punkt og linje
Lad os antage en ret linje og et kendt punkt, hvor vi ønsker at bestemme den korteste afstand mellem den rette linje samt punktet. Det vil sige, den vinkelrette afstand fra punktet til linjen.
Afstandsformlen fra punktet \(P_0(x_0,y_0)\) til en linje \(l=ax+by-c=0\):
\(dist{(P,l)}=\frac{|ax_0+by_0+c|}{\sqrt{a^2+b^2}}\),
hvor \(dist{(P,l)}\) står for distancen mellem \(P,l\).
Lad os tage et eksempel. Vi ønsker at beregne afstanden fra punktet \(P_0(2,4)\) til en linje \(l\): \(4x+3y+5=0\):
\(dist{(P,l)}=\frac{|4\cdot2+3\cdot4+5|}{\sqrt{4^2+3^2}}=\frac{|25|}{5}=5\)
Dvs. distancen mellem \(P\) og \(l\) er 5.












Jeg har 3 punkter. Punkt a,b og c, hvor a og b er kendte, og punktet P er kendt, som er det punkt hvor de skærer hinanden. Punkterne A,B og C udgør hjørnerne i en ligesidet trekant. Punkt C ligger i xy-planen. Hvordan bestemmer jeg koordinaterne til C
Hej Kani
Tak for dit spørgsmål.
Jeg tror ikke, at jeg er helt sikker på dit spørgsmål.
Har du mulighed for at uddybe det (evt. skriv spørgsmålet som det er formuleret i din opgave) 🙂
angående ret linje som parameterforestillingen. Jeg har fået givet: x y = -2 3 = t + 3 – 4.
hvordan finder jeg resultatet?
Hvis jeg har en masse koordinatsæt fx 6 og jeg så skal bestemme den rette linje hvordan gør jeg så dette??